


Description
Classic stewart parallel merupakan sebuah sistem mekanis robotic arm yang menggunakan konfigurasi paralel dengan enam aktuator yang saling terhubung ke platform bergerak. Sistem ini disebut juga dengan istilah “Stewart Platform” dan sering digunakan di berbagai aplikasi seperti simulasi, robotika, dan presisi.
Cara Kerja
a. Aktuasi
Ketika pilot menggerakkan kontrol, sistem akan menganalisis data dan mengubah panjang aktuator untuk menirukan gerakan pesawat.
b. Koordinasi
Enam aktuator secara bersamaan menghasilkan gerakan yang halus dan responsif, sehingga menciptakan pengalaman yang realistis.
c. Feedback Sistem
Sensor mesin bertugas memantau posisi platform dan memberikan informasi kembali sistem kontrol untuk memastikan respons yang akurat terhadap input pengguna.
Keuntungan
a. Stabilitas Tinggi
Memiliki stabilitas lebih baik dibandingkan sistem serial, dikarenakan adanya konfigurasi paralel.
b. Akurasi Tinggi
Memiliki kontrol yang presisi dalam posisi dan orientasi.
c. Fleksibilitas Gerakan
Mampu bergerak ke berbagai arah dan mengubah orientasi dengan cepat.
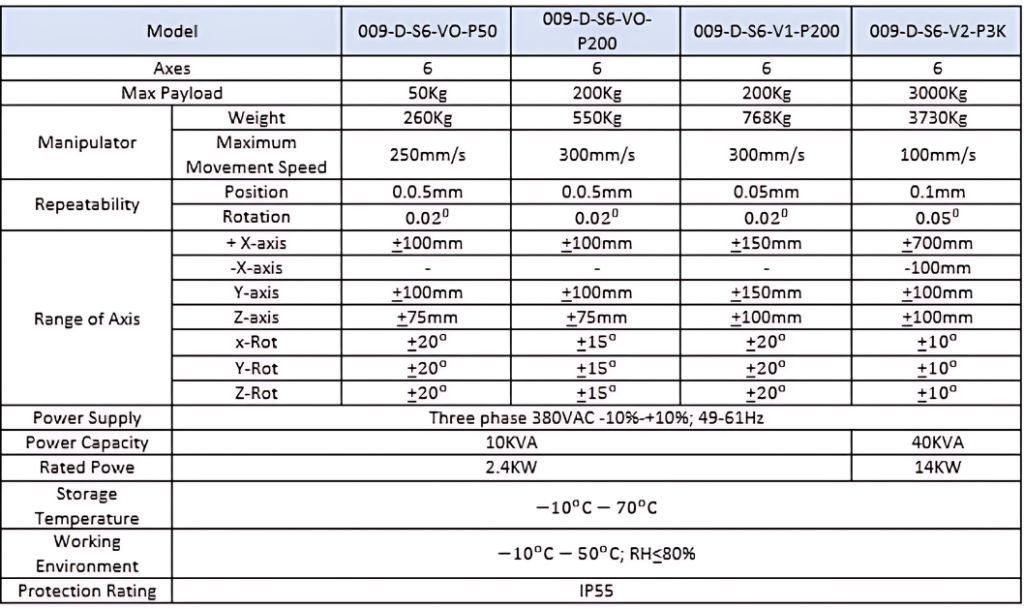
Parameter Teknis
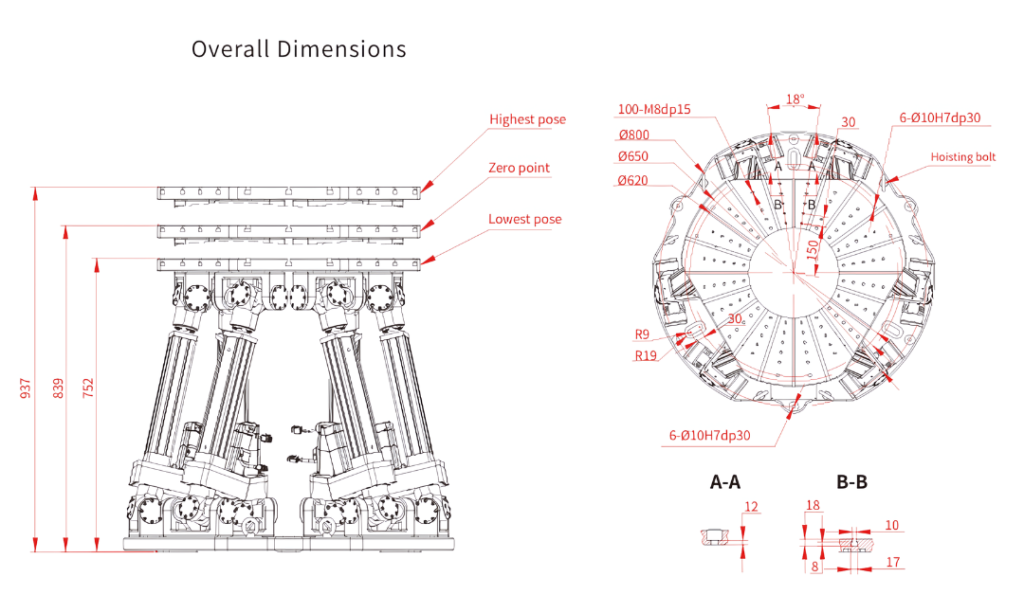
Sketsa Bagan



Reviews
There are no reviews yet.