


Description
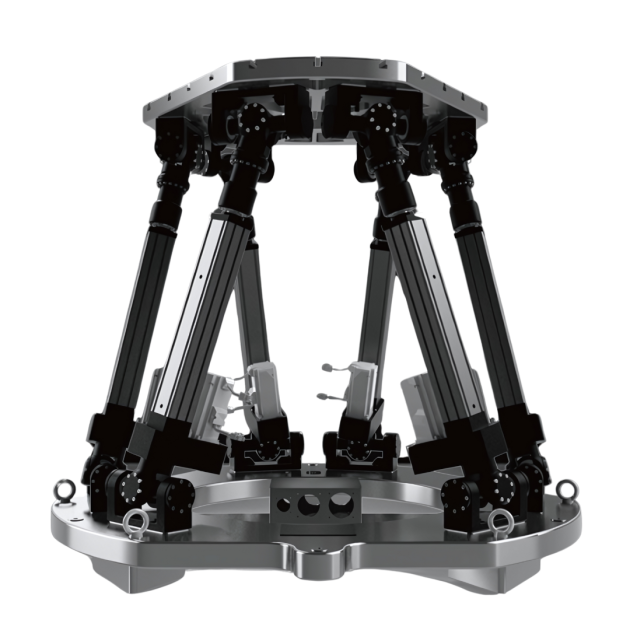
Classical High Speed Parallel merupakan sistem mekanis robotic arm yang menggabungkan prinsip desain klasik dengan konfigurasi paralel. Mesin terdiri dari aktuator atau lengan yang bekerja secara bersamaan untuk menggerakkan platform atau end-effector.
Cara Kerja
a. Penggerak
Setiap bagian lengan mesin dilengkapi dengan motor yang bertujuan menggerakkan lengan.
b. Sensor dan kontrol
Sensor pada mesin bertujuan untuk memonitor posisi & kecepatan.
c. Platform
Platform digerakkan oleh lengan dengan berbagai aplikasi, seperti memasang komponen , pengujian, dan pengepakan.
Keuntungan
a. Berkecepatan tinggi
Menggunakan konfigurasi paralel bertujuan memungkinkan memiliki lebih banyak kekuatan dan kecepatan dikarenakan beban terbagi.
b. Berakurasi tinggi
Memiliki sistem kontrol yang baik & desain telah terintegrasi, sehingga mencapai ketelitian yang tinggi.
c. Fleksibel
Dapat disesuaikan dengan kebutuhan.



Reviews
There are no reviews yet.